d3d12龙书阅读----绘制几何体(上)
d3d12龙书阅读----绘制几何体(上)
本节主要介绍了构建一个简单的彩色立方体所需流程与重要的api
下面主要结合立方体代码分析本节相关知识
顶点
输入装配器阶段的输入
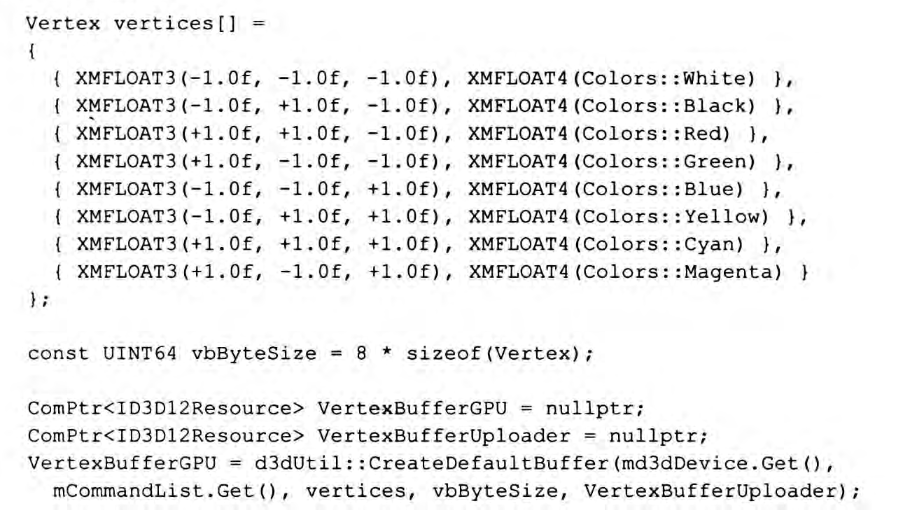
首先,我们需要定义立方体的八个顶点
顶点结构体:
struct Vertex
{
XMFLOAT3 Pos;
XMFLOAT4 Color;
};
当然,对于更复杂的情况,我们不仅要定义顶点的位置与颜色,还要包括法线向量、纹理x坐标、纹理y坐标等等
但在这里情形比较简单
之后,我们还需要定义一个顶点结构体描述子数组,被称为输入布局描述
数组中的每个成员与顶点结构体的成员一一对应,同时也与顶点着色器中的参数对应:
std::vector<D3D12_INPUT_ELEMENT_DESC> mInputLayout;
mInputLayout =
{
{ "POSITION", 0, DXGI_FORMAT_R32G32B32_FLOAT, 0, 0, D3D12_INPUT_CLASSIFICATION_PER_VERTEX_DATA, 0 },
{ "COLOR", 0, DXGI_FORMAT_R32G32B32A32_FLOAT, 0, 12, D3D12_INPUT_CLASSIFICATION_PER_VERTEX_DATA, 0 }
};
//顶点着色器
struct VertexIn
{
float3 PosL : POSITION;
float4 Color : COLOR;
};
D3D12_INPUT_ELEMENT_DESC的定义与参数说明可见:
https://learn.microsoft.com/zh-cn/windows/win32/api/d3d12/ns-d3d12-d3d12_input_element_desc
接着,我们还需要为顶点创建顶点缓冲区,与第四章内容创建深度缓冲区的步骤相似,我们首先要填写D3D12_RESOURCE_DESC结构体描述缓冲区资源,然后使用CreateCommittedResource 方法,创建资源与一个堆,并把资源上传到堆中。
CreateCommittedResource 方法的参数说明可见:
https://learn.microsoft.com/zh-cn/windows/win32/api/d3d12/nf-d3d12-id3d12device-createcommittedresource
其中有三个参数在本节中很重要
一个是D3D12_HEAP_PROPERTIES *pHeapProperties
一个是D3D12_RESOURCE_DESC *pDesc
一个是D3D12_RESOURCE_STATES
D3D12_RESOURCE_STATES代表着资源状态
在d3d的初始化中我们提到这样可以防止资源冒险 比如在读的状态在写资源等等
详细的资源种类可见:
https://learn.microsoft.com/zh-cn/windows/win32/api/d3d12/ne-d3d12-d3d12_resource_states
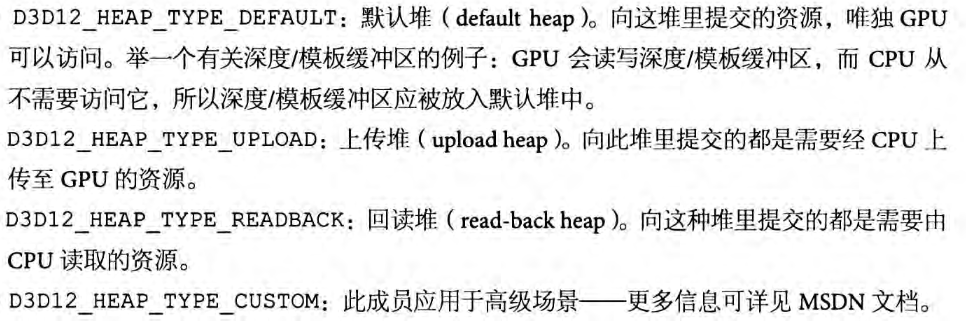
D3D12_HEAP_PROPERTIES是一个结构体:

其中D3D12_HEAP_TYPE的类型主要有以下几种:
D3D12_RESOURCE_DESC 与 D3D12_HEAP_PROPERTIES的创建 这里分别借用了CD3DX12_HEAP_PROPERTIES 与 CD3DX12_RESOURCE_DESC两种变体方法来简化缓冲区的创建过程:
ThrowIfFailed(device->CreateCommittedResource(
//默认堆
&CD3DX12_HEAP_PROPERTIES(D3D12_HEAP_TYPE_DEFAULT),
D3D12_HEAP_FLAG_NONE,
//bytesize 代表缓冲区所占字节数
&CD3DX12_RESOURCE_DESC::Buffer(byteSize),
//common状态
D3D12_RESOURCE_STATE_COMMON,
nullptr,
IID_PPV_ARGS(defaultBuffer.GetAddressOf())));
让我们回到创建顶点缓冲区上来,当我们想要为树木、地形等默认几何体(每一帧都不会发生变化的结合体)来创建顶点缓冲区时,常常选择默认堆来优化性能,当顶点缓冲区初始化完毕后,只有gpu需要从中读取数据来绘制几何体。但是在初始化缓冲区时,需要cpu向默认堆中的顶点缓冲区写入数据,这是我们就需要一个上传堆作为中介,为此本节编写了CreateDefaultBuffer函数:
Microsoft::WRL::ComPtr<ID3D12Resource> d3dUtil::CreateDefaultBuffer(
ID3D12Device* device,
ID3D12GraphicsCommandList* cmdList,
const void* initData,
UINT64 byteSize,
Microsoft::WRL::ComPtr<ID3D12Resource>& uploadBuffer)
{
//创建缓冲区资源
ComPtr<ID3D12Resource> defaultBuffer;
ThrowIfFailed(device->CreateCommittedResource(
&CD3DX12_HEAP_PROPERTIES(D3D12_HEAP_TYPE_DEFAULT),
D3D12_HEAP_FLAG_NONE,
&CD3DX12_RESOURCE_DESC::Buffer(byteSize),
D3D12_RESOURCE_STATE_COMMON,
nullptr,
IID_PPV_ARGS(defaultBuffer.GetAddressOf())));
//创建上传堆 作为中介
ThrowIfFailed(device->CreateCommittedResource(
//上传堆
&CD3DX12_HEAP_PROPERTIES(D3D12_HEAP_TYPE_UPLOAD),
D3D12_HEAP_FLAG_NONE,
&CD3DX12_RESOURCE_DESC::Buffer(byteSize),
//上传堆所需要的启动状态
D3D12_RESOURCE_STATE_GENERIC_READ,
nullptr,
IID_PPV_ARGS(uploadBuffer.GetAddressOf())));
// 描述我们要传入默认堆的数据
D3D12_SUBRESOURCE_DATA subResourceData = {};
subResourceData.pData = initData;
subResourceData.RowPitch = byteSize;
subResourceData.SlicePitch = subResourceData.RowPitch;
//转换资源状态 将数据复制给上传堆 上传堆再复制到默认堆
cmdList->ResourceBarrier(1, &CD3DX12_RESOURCE_BARRIER::Transition(defaultBuffer.Get(),
D3D12_RESOURCE_STATE_COMMON,
//资源处于复制目标状态
D3D12_RESOURCE_STATE_COPY_DEST));
UpdateSubresources<1>(cmdList, defaultBuffer.Get(), uploadBuffer.Get(), 0, 0, 1, &subResourceData);
cmdList->ResourceBarrier(1, &CD3DX12_RESOURCE_BARRIER::Transition(defaultBuffer.Get(),
D3D12_RESOURCE_STATE_COPY_DEST, D3D12_RESOURCE_STATE_GENERIC_READ));
return defaultBuffer;
}
整个创建顶点缓冲区的流程如下:
然后我们还需要为其创建视图(无需为其创建描述符堆) 以及将其绑定到渲染流水线上的输入槽,这样就可以向输入装配器传入顶点数据:
D3D12_VERTEX_BUFFER_VIEW VertexBufferView()const
{
D3D12_VERTEX_BUFFER_VIEW vbv;
//虚拟地址 使用函数即可获得
vbv.BufferLocation = VertexBufferGPU->GetGPUVirtualAddress();
//顶点缓冲区所占字节大小
vbv.StrideInBytes = VertexByteStride;
//每个顶点数据所占字节大小
vbv.SizeInBytes = VertexBufferByteSize;
return vbv;
}
//0 代表绑定第0个输入槽 共有16个
//1 代表顶点缓冲区的数量为1
mCommandList->IASetVertexBuffers(0, 1, &mBoxGeo->VertexBufferView());
最后绘制顶点:
定义图元拓扑类型
mCommandList->IASetPrimitiveTopology(D3D11_PRIMITIVE_TOPOLOGY_TRIANGLELIST);

索引
索引缓冲区的创建过程和顶点的过程很类似:
定义索引
std::array<std::uint16_t, 36> indices =
{
// front face
0, 1, 2,
0, 2, 3,
// back face
4, 6, 5,
4, 7, 6,
// left face
4, 5, 1,
4, 1, 0,
// right face
3, 2, 6,
3, 6, 7,
// top face
1, 5, 6,
1, 6, 2,
// bottom face
4, 0, 3,
4, 3, 7
};
//索引缓冲区大小
const UINT ibByteSize = (UINT)indices.size() * sizeof(std::uint16_t);
//定义默认堆 与 上传堆
Microsoft::WRL::ComPtr<ID3D12Resource> IndexBufferGPU = nullptr;
Microsoft::WRL::ComPtr<ID3D12Resource> IndexBufferUploader = nullptr;
//初始化索引缓冲区
mBoxGeo->IndexBufferGPU = d3dUtil::CreateDefaultBuffer(md3dDevice.Get(),
mCommandList.Get(), indices.data(), ibByteSize, mBoxGeo->IndexBufferUploader);
//创建视图 绑定到渲染流水线
D3D12_INDEX_BUFFER_VIEW IndexBufferView()const
{
D3D12_INDEX_BUFFER_VIEW ibv;
ibv.BufferLocation = IndexBufferGPU->GetGPUVirtualAddress();
ibv.Format = IndexFormat;
ibv.SizeInBytes = IndexBufferByteSize;
return ibv;
}
mCommandList->IASetIndexBuffer(&mBoxGeo->IndexBufferView());
//绘制顶点
mCommandList->DrawIndexedInstanced(
mBoxGeo->DrawArgs["box"].IndexCount,
1, 0, 0, 0);
注意在上述过程中我们采用索引来绘制顶点 而不是像上一部分那样使用DrawInstanced 参数解释如下:

顶点着色器
顶点着色器代码如下
//cbuffer 代表常量缓冲区 b0存储资源的寄存器
cbuffer cbPerObject : register(b0)
{
//从局部空间转换到齐次裁剪空间
float4x4 gWorldViewProj;
};
//顶点着色器输入
//冒号后面的是参数语义
//要和之前提到的输入布局描述对应 同时也要与顶点着色器的输入参数对应
//冒号签名的是自定义的数据成员的名称 叫做输入签名
struct VertexIn
{
float3 PosL : POSITION;
float4 Color : COLOR;
};
//顶点着色器输出 语义作为下一步几何着色器或者像素着色器的输入参数
struct VertexOut
{
float4 PosH : SV_POSITION;
float4 Color : COLOR;
};
VertexOut VS(VertexIn vin)
{
VertexOut vout;
//转换到齐次裁剪空间
//mul 有向量矩阵 或者矩阵矩阵乘法的多个重载版本
//透视除法步骤是交由硬件处理 人为无需编写代码
vout.PosH = mul(float4(vin.PosL, 1.0f), gWorldViewProj);
// 直接将输入颜色传递给像素着色器
vout.Color = vin.Color;
return vout;
}
不同寄存器存储不同类型资源如下:

由于使用的着色器语言 HLSL没有 引用或者指针 所以返回多条数据 可以使用结构体的形式 在HLSL中所有函数都是内联的
注意上述代码的语义都是特定的 比如SV_POSITION就代表着存储着齐次裁剪空间的顶点位置信息 其余语义说明可见:
https://learn.microsoft.com/zh-cn/windows/win32/direct3dhlsl/dx-graphics-hlsl-semantics
还有一个地方注意的是 顶点着色器中使用的数据必须要都在之前的顶点结构体中定义(当然还有输入布局描述)但是我们定义的顶点结构体数据可以更多 必须是一个包含关系
像素着色器
对顶点着色器输出的数据 进行插值 在不使用几何着色器的情况下 插值的结果作为像素着色器的输入
这里还强调了一下pixel fragment 与 pixel的区别 像素着色器的输入是像素片段 而像素是已经通过深度测试 模版测试等等 最终绘制到屏幕上去的像素
d3d还提到 由于硬件优化的原因 有些像素片段 进行early-z之后就已经被筛除 但是有可能像素着色器中对像素片段的深度值进行了改变 此时就不能进行early-z 因为像素片段的最终深度值尚未确定
本节的像素着色器的代码很简单,直接输出颜色:
函数参数列表之后的SV_Target语义表示 输出的格式应该与渲染目标的格式相匹配
float4 PS(VertexOut pin) : SV_Target
{
return pin.Color;
}
着色器编译
ComPtr<ID3DBlob> mvsByteCode = nullptr;
ComPtr<ID3DBlob> mpsByteCode = nullptr;
mvsByteCode = d3dUtil::CompileShader(L"Shaders\\color.hlsl", nullptr, "VS", "vs_5_0");
mpsByteCode = d3dUtil::CompileShader(L"Shaders\\color.hlsl", nullptr, "PS", "ps_5_0");
ComPtr<ID3DBlob> d3dUtil::CompileShader(
const std::wstring& filename,
const D3D_SHADER_MACRO* defines,
const std::string& entrypoint,
const std::string& target)
{
UINT compileFlags = 0;
#if defined(DEBUG) || defined(_DEBUG)
compileFlags = D3DCOMPILE_DEBUG | D3DCOMPILE_SKIP_OPTIMIZATION;
#endif
HRESULT hr = S_OK;
ComPtr<ID3DBlob> byteCode = nullptr;
ComPtr<ID3DBlob> errors;
hr = D3DCompileFromFile(filename.c_str(), defines, D3D_COMPILE_STANDARD_FILE_INCLUDE,
entrypoint.c_str(), target.c_str(), compileFlags, 0, &byteCode, &errors);
if(errors != nullptr)
OutputDebugStringA((char*)errors->GetBufferPointer());
ThrowIfFailed(hr);
return byteCode;
}
其中比较重要的参数有
文件名 比如:L"Shaders\color.hlsl" 这里的类型是wstring 因此要使用L
着色器的入口点 VS/PS
着色器版本 vs_5_0等等

这里简要介绍了一下ID3DBlob这个类型:

我在知乎看到一个回答介绍的更为详细:
https://zhuanlan.zhihu.com/p/304352552
下面引用如下
Blob(binary large object),二进制大对象。ID3DBlob则是DX12内建的一种存放较为庞大的二进制对象。在GPU上面,我们对于大部分资源的描述一般都是用地址起点(address starting point)加上对象内存容量(object memory)来描述并且确定某一对象资源
因为其资源内存容量较为庞大的特点,这些资源大多数都不能直接上传到GPU,而是首先在CPU预处理成Blob,然后再上传绑定到GPU上面,才能供GPU使用
上传的对象包括但不限于顶点数据(Vertex data),索引数据(Index data),材质(Texture)等,还包括我们着色器程序(shader)。即我们写的HLSL(high level shader language)程序,需要在CPU端通过预处理和编译才能上传到GPU端供GPU读取并且执行
常量缓冲区
常量缓冲区也是一种GPU资源(ID3D12Resource),但是常量缓冲区是CPU每帧都要更新一次,比如摄像机如果每帧都在移动,那么常量缓冲区每帧都需要更新其中的视图矩阵,所以我们需要将常量缓冲区创建到一个上传堆而非默认堆,这样我们就可以从cpu端更新常量。
下面让我们来看看示例程序中是如何创建常量缓冲区的
首先,定义常量缓冲区结构体:
struct ObjectConstants
{
XMFLOAT4X4 WorldViewProj = MathHelper::Identity4x4();
};
我们可以看到目前里面只定义了视图矩阵
其次,定义了上传缓冲区的辅助类UploadBuffer.h
注意该辅助类主要用于需要提交到上传堆的gpu资源,而我们之前有一个用于创建默认堆的辅助函数:
template<typename T>
class UploadBuffer
{
public:
//参数说明
//elementCount表示ObjectConstants的数量
//isConstantBuffer表示是否为要创建常量缓冲区
UploadBuffer(ID3D12Device* device, UINT elementCount, bool isConstantBuffer) :
mIsConstantBuffer(isConstantBuffer)
{
mElementByteSize = sizeof(T);
//如果为常量缓冲区,重新计算ObjectConstants结构体的大小
if(isConstantBuffer)
mElementByteSize = d3dUtil::CalcConstantBufferByteSize(sizeof(T));
//创建gpu资源(常量缓冲区) 与 一个上传堆 并把资源提交到堆上
ThrowIfFailed(device->CreateCommittedResource(
&CD3DX12_HEAP_PROPERTIES(D3D12_HEAP_TYPE_UPLOAD),
D3D12_HEAP_FLAG_NONE,
&CD3DX12_RESOURCE_DESC::Buffer(mElementByteSize*elementCount),
D3D12_RESOURCE_STATE_GENERIC_READ,
nullptr,
IID_PPV_ARGS(&mUploadBuffer)));
//使用map方法,在cpu端分配一块虚拟地址范围,用来映射gpu的资源
ThrowIfFailed(mUploadBuffer->Map(0, nullptr, reinterpret_cast<void**>(&mMappedData)));
}
UploadBuffer(const UploadBuffer& rhs) = delete;
UploadBuffer& operator=(const UploadBuffer& rhs) = delete;
~UploadBuffer()
{
//调用unmap取消对gpu资源的映射
if(mUploadBuffer != nullptr)
mUploadBuffer->Unmap(0, nullptr);
mMappedData = nullptr;
}
//获取gpu资源
ID3D12Resource* Resource()const
{
return mUploadBuffer.Get();
}
//从cpu端更新常量缓冲区中的内容
void CopyData(int elementIndex, const T& data)
{
memcpy(&mMappedData[elementIndex*mElementByteSize], &data, sizeof(T));
}
private:
Microsoft::WRL::ComPtr<ID3D12Resource> mUploadBuffer;
BYTE* mMappedData = nullptr;
UINT mElementByteSize = 0;
bool mIsConstantBuffer = false;
};
创建常量缓冲区 我们可以使用如下代码:
std::unique_ptr<UploadBuffer<ObjectConstants>> mObjectCB = nullptr;
定义常量缓冲区存储的是ObjectConstants类型数据 数量为1
mObjectCB = std::make_unique<UploadBuffer<ObjectConstants>>(md3dDevice.Get(), 1, true);
上述代码中 我们可以看到UploadBuffer这个类是使用了模版 这意味着该方法不仅可以创建常量缓冲区资源 也可以创建其它使用上传堆的gpu资源
同时上述代码中在获取ObjectConstants的大小时,我们可以看到使用了d3dUtil::CalcConstantBufferByteSize的方法,该方法代码如下:
static UINT CalcConstantBufferByteSize(UINT byteSize)
{
// Example: Suppose byteSize = 300.
// (300 + 255) & ~255
// 555 & ~255
// 0x022B & ~0x00ff
// 0x022B & 0xff00
// 0x0200
// 512
return (byteSize + 255) & ~255;
}
这是因为常量缓冲区的大小必须是硬件最小分配空间的整数倍(通常是256b) 这是因为硬件只能按照这样的规格来查看常量数据,所以要对常量缓冲区的数组进行填充字节
然后,我们还需要创建相应的描述符来将资源绑定到渲染流水线上,和之前顶点缓冲区描述符以及索引不同,我们要为常量缓冲区描述符创建描述堆,然后再创建描述符:
//创建cbv描述符堆
void BoxApp::BuildDescriptorHeaps()
{
D3D12_DESCRIPTOR_HEAP_DESC cbvHeapDesc;
cbvHeapDesc.NumDescriptors = 1;
cbvHeapDesc.Type = D3D12_DESCRIPTOR_HEAP_TYPE_CBV_SRV_UAV;
cbvHeapDesc.Flags = D3D12_DESCRIPTOR_HEAP_FLAG_SHADER_VISIBLE;
cbvHeapDesc.NodeMask = 0;
ThrowIfFailed(md3dDevice->CreateDescriptorHeap(&cbvHeapDesc,
IID_PPV_ARGS(&mCbvHeap)));
}
//计算第i个物体ObjectConstants的起始内存位置 与大小
UINT objCBByteSize = d3dUtil::CalcConstantBufferByteSize(sizeof(ObjectConstants));
D3D12_GPU_VIRTUAL_ADDRESS cbAddress = mObjectCB->Resource()->GetGPUVirtualAddress();
int boxCBufIndex = 0;
cbAddress += boxCBufIndex*objCBByteSize;
//填写描述符 创建视图
D3D12_CONSTANT_BUFFER_VIEW_DESC cbvDesc;
cbvDesc.BufferLocation = cbAddress;
cbvDesc.SizeInBytes = d3dUtil::CalcConstantBufferByteSize(sizeof(ObjectConstants));
md3dDevice->CreateConstantBufferView(
&cbvDesc,
mCbvHeap->GetCPUDescriptorHandleForHeapStart());
根签名与描述符表
根签名的作用是,定义绑定到渲染流水线上的资源,与对应的着色器的输入寄存器的映射关系,从而可以被着色器程序访问。
不同的绘制调用可能用到一组不同的着色器程序,这就意味着用到不同的根签名。
在d3d中,根签名使用ID3DRootSignature接口来表示,并且由一组描述绘制调用过程中着色器所需资源的根参数定义而成
根参数可以是根常量、根描述符或者描述符表。在本章中,我们只是简要了解根签名,详细的介绍将在下一章中展开,本章只使用了描述符表,即描述符堆中存有描述符的一块连续区域
下面根据代码简要分析:
void BoxApp::BuildRootSignature()
{
// 根参数
CD3DX12_ROOT_PARAMETER slotRootParameter[1];
// 创建一个cbv的描述符表
CD3DX12_DESCRIPTOR_RANGE cbvTable;
cbvTable.Init(D3D12_DESCRIPTOR_RANGE_TYPE_CBV,
1, //描述符数量
0 //绑定到b0寄存器);
slotRootParameter[0].InitAsDescriptorTable(1, &cbvTable);
// 根签名由一组根参数构成
CD3DX12_ROOT_SIGNATURE_DESC rootSigDesc(1, slotRootParameter, 0, nullptr,
D3D12_ROOT_SIGNATURE_FLAG_ALLOW_INPUT_ASSEMBLER_INPUT_LAYOUT);
// 创建根签名 必须要先将根签名的描述布局通过ID3DBlob序列化才能传入创建根签名的方法
ComPtr<ID3DBlob> serializedRootSig = nullptr;
ComPtr<ID3DBlob> errorBlob = nullptr;
HRESULT hr = D3D12SerializeRootSignature(&rootSigDesc, D3D_ROOT_SIGNATURE_VERSION_1,
serializedRootSig.GetAddressOf(), errorBlob.GetAddressOf());
if(errorBlob != nullptr)
{
::OutputDebugStringA((char*)errorBlob->GetBufferPointer());
}
ThrowIfFailed(hr);
ThrowIfFailed(md3dDevice->CreateRootSignature(
0,
serializedRootSig->GetBufferPointer(),
serializedRootSig->GetBufferSize(),
IID_PPV_ARGS(&mRootSignature)));
}
然后还要通过命令列表设置cbv堆与根签名,再通过设置描述符表绑定资源:
ID3D12DescriptorHeap* descriptorHeaps[] = { mCbvHeap.Get() };
mCommandList->SetDescriptorHeaps(_countof(descriptorHeaps), descriptorHeaps);
mCommandList->SetGraphicsRootSignature(mRootSignature.Get());
mCommandList->SetGraphicsRootDescriptorTable(0, mCbvHeap->GetGPUDescriptorHandleForHeapStart());
一些关于根签名的注意事项:

配置光栅器状态与流水线状态对象
大多数控制图形流水线状态对象被统称为流水线状态对象PSO,用接口ID3D12PipelineState表示
创建其的代码如下:
void BoxApp::BuildPSO()
{
D3D12_GRAPHICS_PIPELINE_STATE_DESC psoDesc;
ZeroMemory(&psoDesc, sizeof(D3D12_GRAPHICS_PIPELINE_STATE_DESC));
//绑定输入布局
psoDesc.InputLayout = { mInputLayout.data(), (UINT)mInputLayout.size() };
//根签名
psoDesc.pRootSignature = mRootSignature.Get();
//顶点着色器
psoDesc.VS =
{
reinterpret_cast<BYTE*>(mvsByteCode->GetBufferPointer()),
mvsByteCode->GetBufferSize()
};
//像素着色器
psoDesc.PS =
{
reinterpret_cast<BYTE*>(mpsByteCode->GetBufferPointer()),
mpsByteCode->GetBufferSize()
};
//填写光栅器状态 这里使用默认值创建
psoDesc.RasterizerState = CD3DX12_RASTERIZER_DESC(D3D12_DEFAULT);
psoDesc.BlendState = CD3DX12_BLEND_DESC(D3D12_DEFAULT);
psoDesc.DepthStencilState = CD3DX12_DEPTH_STENCIL_DESC(D3D12_DEFAULT);
psoDesc.SampleMask = UINT_MAX;
psoDesc.PrimitiveTopologyType = D3D12_PRIMITIVE_TOPOLOGY_TYPE_TRIANGLE;
psoDesc.NumRenderTargets = 1;
psoDesc.RTVFormats[0] = mBackBufferFormat;
psoDesc.SampleDesc.Count = m4xMsaaState ? 4 : 1;
psoDesc.SampleDesc.Quality = m4xMsaaState ? (m4xMsaaQuality - 1) : 0;
psoDesc.DSVFormat = mDepthStencilFormat;
ThrowIfFailed(md3dDevice->CreateGraphicsPipelineState(&psoDesc, IID_PPV_ARGS(&mPSO)));
}
描述符的详细属性可查看微软文档
热门相关:顶级气运,悄悄修炼千年 医门宗师 我的末世基地车 我的末世基地车 美漫之大冬兵