隐式渲染 收集 SphereTracing
Implicit
何为隐式?隐式(Implicit)的是显式(explicit)的反义词。
explicit可以简单理解为用网格等信息描述的几何形状,网格信息是离散的,信息量越大描述越精准。Implicit则不需要顶点等显式信息,用方程,或者说有符号距离场 (Signed Distance Field) 即SDF,表示几何形状的数学模型。
SDF
在SDF中,空间中的每一点都有一个值,表示该点到最近表面的距离。这个距离可以是正的(如果点在形状的外部),也可以是负的(如果点在形状的内部)。SDF提供了一种简洁而强大的方式来描述复杂的三维形状,包括难以用传统多边形网格表示的形状。
SDF的优势:
- 高效的几何操作:进行布尔运算以及形状变形和平滑处理变得简单高效。
- 复杂形状的表示:特别适合描述复杂或有机形状,如流体、云雾和生物组织。
- 动态变化的支持:使实时更新和变形成为可能。
对几何primitive的sdf描述
Inigo Quilez :: computer graphics, mathematics, shaders, fractals, demoscene and more (iquilezles.org)
Sphere Tracing
why
传统的光线追踪算法,通过发送光线并检测这些光线与场景中物体的交点,进行着色。但是当场景使用SDF来表示时,传统的交点检测方法不再适用。原因在于SDF和多边形网格表示场景的方式截然不同:
- 顶点表示:在传统的多边形网格表示中,物体由许多小的平面片(通常是三角形)构成的。这些三角形有明确的边界和顶点,因此当光线与这些三角形相交时,可以通过数学计算找到精确的交点。
- SDF表示:相比之下,SDF场景被视为一个连续的体。体中每个点都有一个值,表示该点到最近表面的距离。这种表示方法不涉及明确的边界或顶点,而是提供关于形状表面的连续信息。
由于SDF没有离散的多边形或边界,传统的光线与多边形的交点检测算法(通常涉及线性代数和平面几何计算)不再适用。在SDF表示的场景中,没有明确的多边形表面可以直接与光线进行交点计算。因此需要Sphere Tracing这样的算法来处理SDF场景。
How
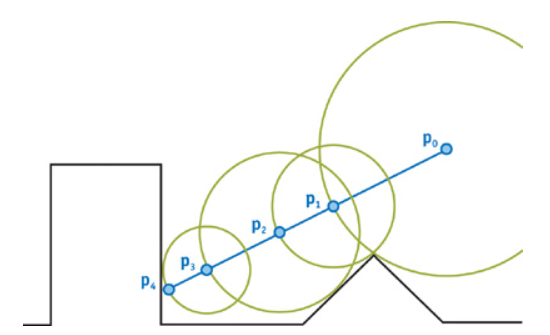
原版的SphereTracing十分讨巧,其基本原理非常简洁,也非常聪明:
- 从点 \(p_0\) 开始投射一条 ray,以 SDF 值 \(f(p_0)\) 为步长进行一次 marching。
- 以上次 marching 的终点为起点,以 \(f(p_1)\) 为步长继续下一次 marching。
- 重复 marching 直到 \(f(p_n)\) < \(\epsilon\) , \(\epsilon\) 为预设的阈值。此时我们认为 \(f(p_n)\) 即为交点。
Enhanced Sphere Tracing
上述的传统 Sphere Tracing 算法冗余的步进次数很多,为了进一步提高效率,诞生了很多种优化方案。
binary search 二分查找法,实际效果不理想,并且遇上TPMS这种复杂结构会有更多问题
Inigo Quilez :: computer graphics, mathematics, shaders, fractals, demoscene and more (iquilezles.org)
Segment Tracing 通过假设场景是 \(C^2\) 连续去加长初始 marching 的距离,有效减少 marching 次数的同时,大幅提升了每次 marching 的消耗,效果不理想,并且在有棱角的场景表现更差
https://diglib.eg.org/bitstream/handle/10.1111/cgf13951/v39i2pp545-554.pdf
GitHub - aparis69/Segment-Tracing: Source code for the Computer Graphics Forum paper: Segment Tracing Using Local Lipschitz Bounds. Presented at Eurographics 2020.
【光线追踪】Segment Tracing:一种可能加速距离场求交的实时光线追踪方案 - 知乎 (zhihu.com)
Enhanced Sphere Tracing 采用激进的 marching 步长,即设定一个步长倍数\(\alpha\) ,marching 步长改为 \(f(p_n) * \alpha\) 而不是 Sphere Tracing 保守的 \(f(p_n)\) 。只要两个 sphere 相交,就说明本次 marching 可安全,否则退回到点 \(p_n\) 的位置重新进行保守的 marching。

Accelerating Sphere Tracing 在 enhanced 的基础上更进一步。假设前两次 marching 所形成的 sphere 都相切于同一平面,那么下一次可以尝试 marching 同样与该平面相切并且也与上一次的 marching sphere 相切的距离。同样,如果尝试失败则回退至保守 marching。

上述两个方法都是在2023年以前最优秀的 marching 算法之一,直到 Automatic Step Size Relaxation。
Automatic step size relaxation
Automatic step size relaxation 可以根据历史 marching 的情况,动态调整步长:平面多的地方。可以走相切平面的激进步长,而曲面多的地方则调整为走更保守的步长。
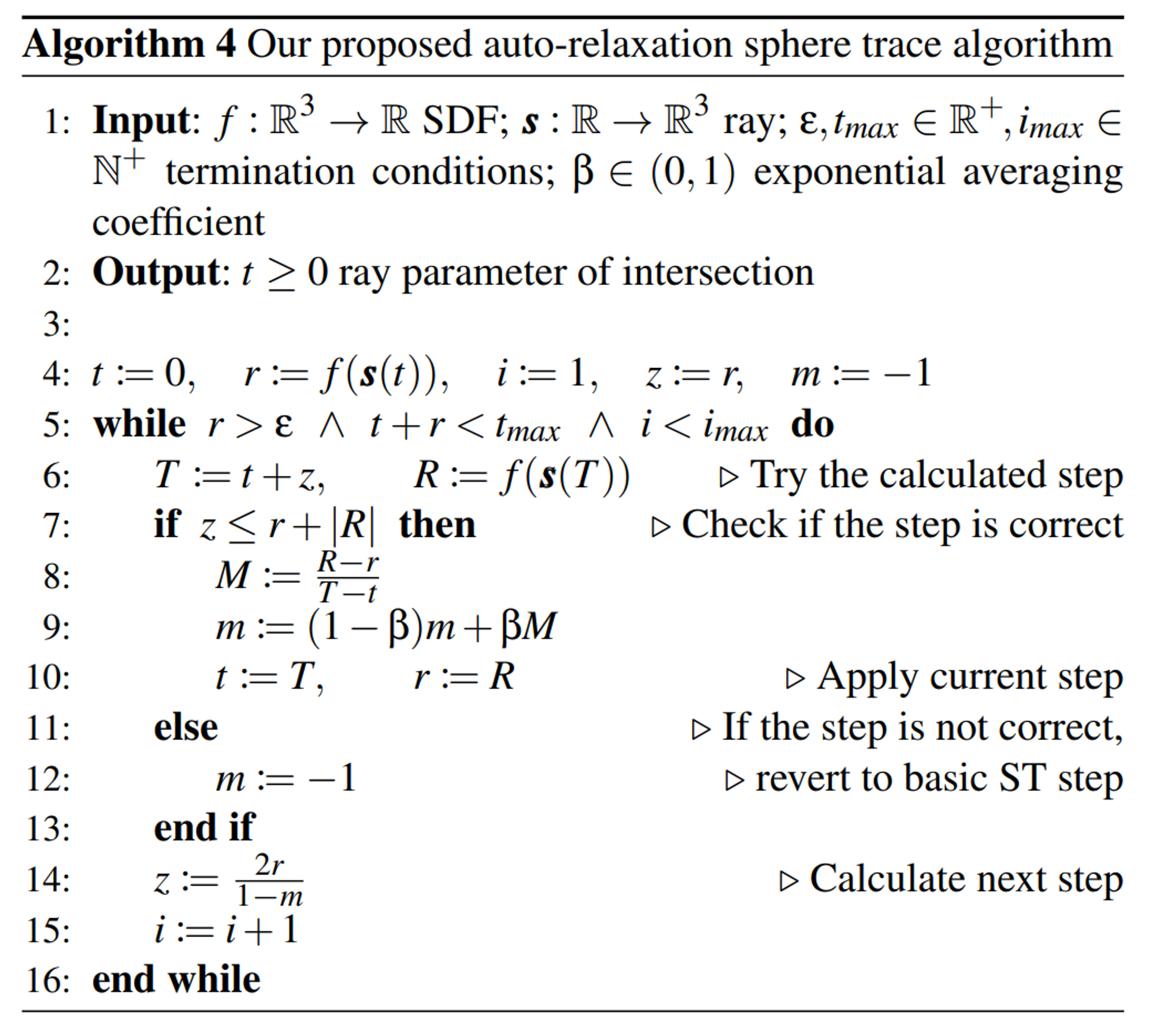
每次 marching 不断更新近似斜率 m,然后用它来指导下一次 marching。
博主拙劣的C++实现
auto trace_auto_relaxation = [&](glm::vec3 p)
{
float t = 0.0f;
float r = sdf(p);
float m = -1.0f;
float z = r;
const float beta = 0.3f;
for (int i = 0; i < max_steps; i++)
{
if (r < eps) {
return true;
}
if (t + r > max_dist) {
break;
}
glm::vec3 next_p = p + ray_dir * z * relaxation_factor;
float R = sdf(next_p);
bool doBackStep = z > abs(R) + r;
if (!doBackStep) {
float M = (R - r) / (z + 1e-5f);
m = (1.0f - beta) * m + beta * M;
t += z * relaxation_factor;
p = next_p;
r = R;
}
else {
m = -1.0f;
}
float omega = glm::max(1.0f, 2.0f / (1.0f - m));
z = glm::max(eps, r * omega);
}
return false;
};
But
讲完了吗?讲完我要开始转了。
上述的所有方法,对 TPMS(Triply Periodic Minimal Surfaces 三周期极小曲面),都起不到多少作用。目前效果最好的办法只能是力大砖飞——marching 步长乘以系数 \(\alpha ,\alpha < 1\) ,以非常保守的步长去小心翼翼的找TPMS表面。也是博主目前最头疼的问题,欢迎讨论。
